Besturingssoftware voor Winch met Constant Tensioning

Lees meer...
Besturingsoplossing voor Sloopkraan met Driedelige Giek (46 meter)

Lees meer...
Besturing voor pompen en koelmachines t.b.v. klimaatregeling

Lees meer...
Zaaimachine – Aansturing verdeelkoppen via zaaicomputer

Lees meer...
Back-up en versiebeheer PLC-programma’s laboratoriuminstallaties
Lees meer...
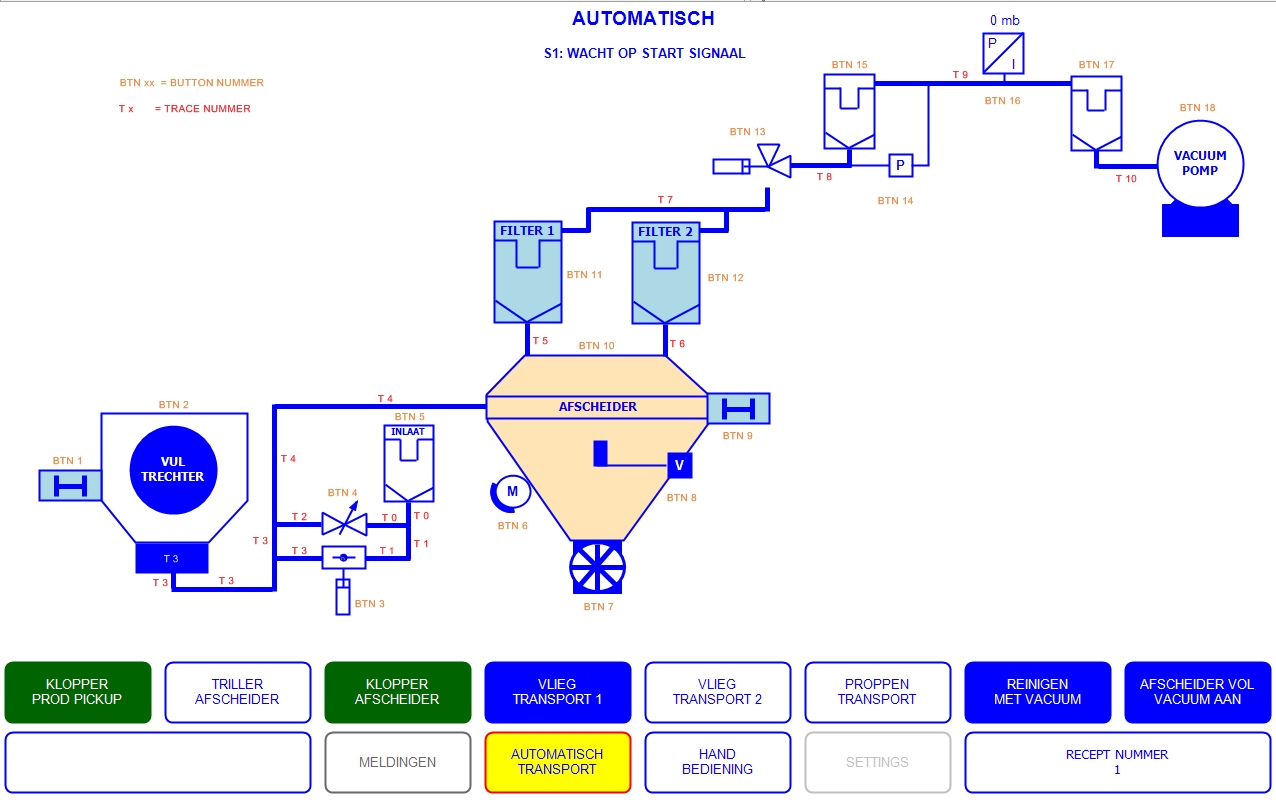
Ontwerp en programmatie van telmachines voor voedselverpakkingen
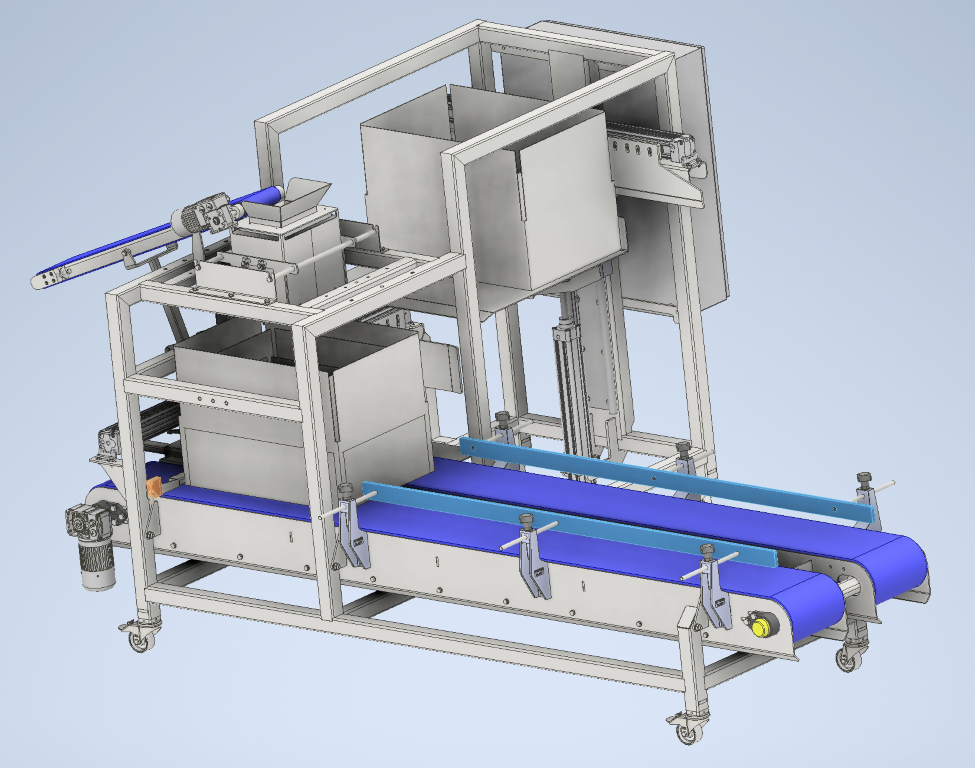
Lees meer...
Besturing en automatisering van sluisinstallatie voor recreatiepark

Lees meer...
Elektrische besturing en programmatie van een rasplijn voor kaasverwerkend bedrijf

Lees meer...
Automatiseringsprogramma voor bigbag-reinigingsinstallatie

Lees meer...
Modernisering van besturing voor vulcarrousel in kaasverwerkend bedrijf

Lees meer...
PLC-programmering voor aansturing azimutschroef op sleepboot

Lees meer...
PLC-gestuurd branddetectiesysteem voor perscontainers

Lees meer...
Ontwikkeling en automatisering van bermstabilisatie-machine

Lees meer...